支持静力、模态、谐响应、随机振动、谱分析、屈曲、冲击、多体等多种分析类型,助力解决重大装备的静、动强度设计和安全校核分析等工程仿真问题。
支持直接求解法及迭代法等解算方法,支持各向同性材料、完全各向异性材料、正交各向异性材料、复合材料等材料,支持实体、杆、梁、板、平面应力应变、质量点、弹簧、阻尼、管、间隙、循环对称等单元类型,支持多点约束、刚性体、绑定等连接方式,支持节点力、压力、分布力、惯性载荷、基础激励等载荷类型,支持位移约束,支持位移、速度、加速度、应力、应变、约束反力等后处理输出;
具备线性静力、模态、直接频响、直接瞬态、模叠瞬态、模叠频响、响应谱、随机振动、线性屈曲等分析类型;
可解决战略装备、航空、航天、航发、兵器、船舶、汽车等领域的静强度分析、动力学分析、稳定性分析等工程仿真问题。
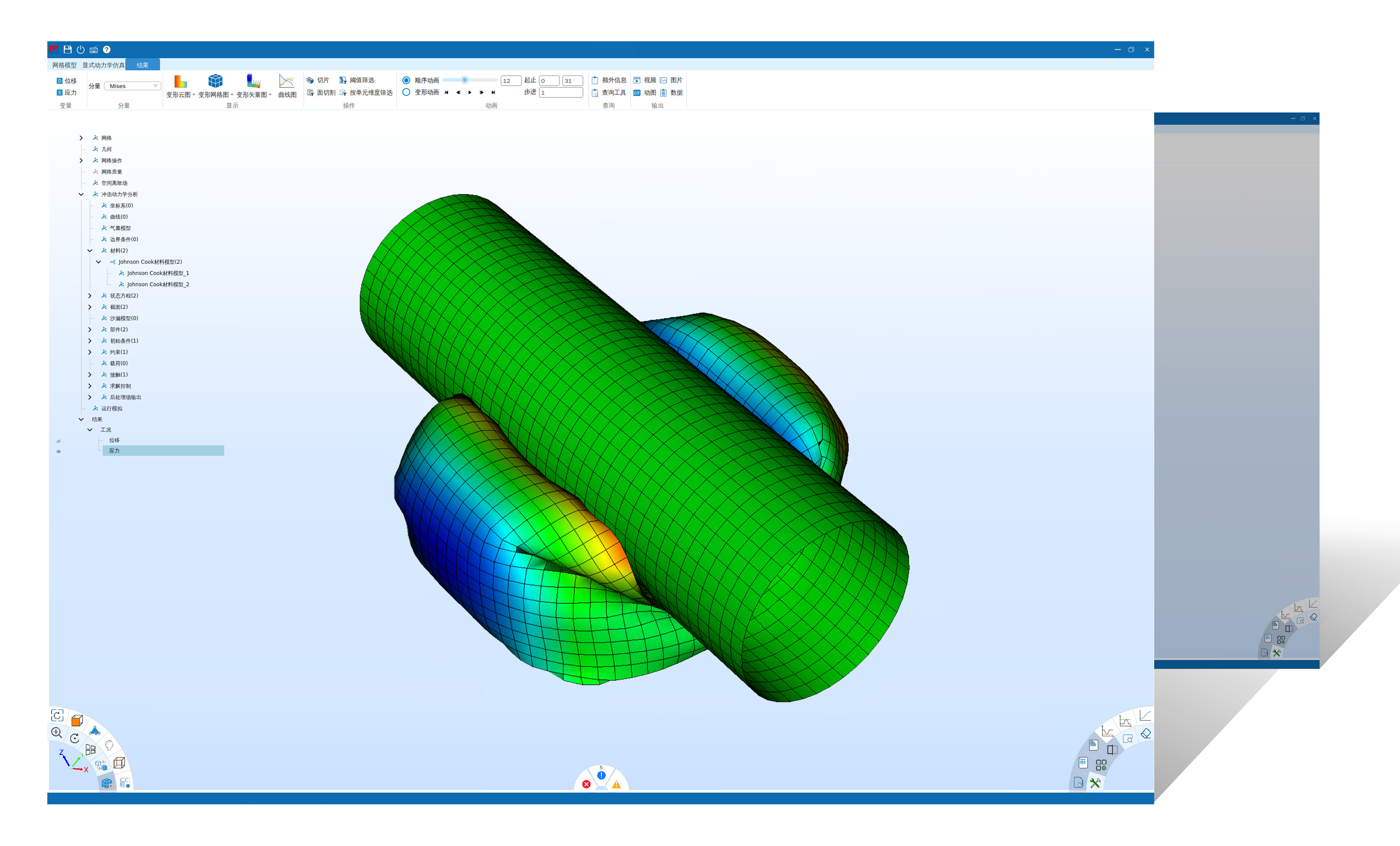
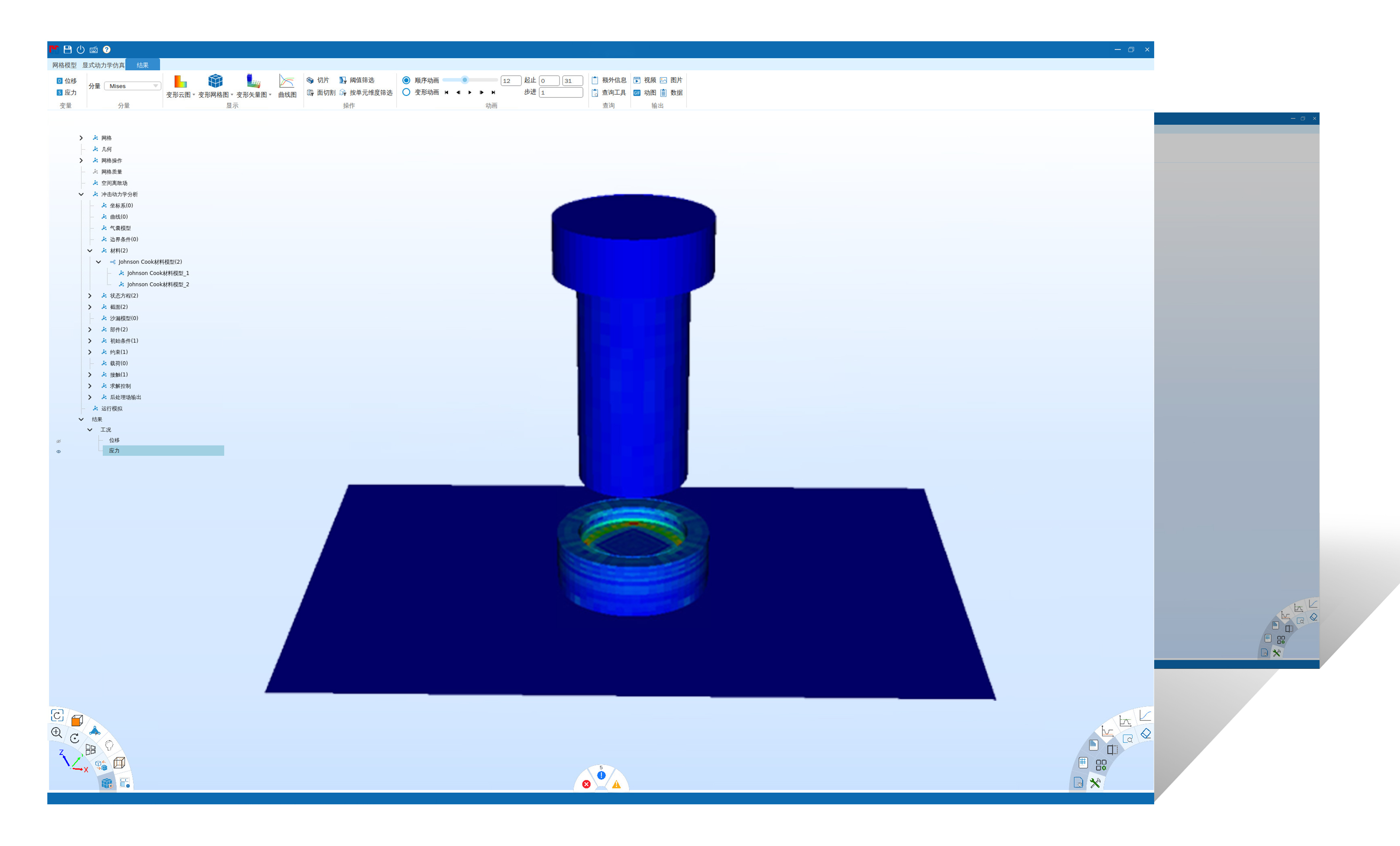
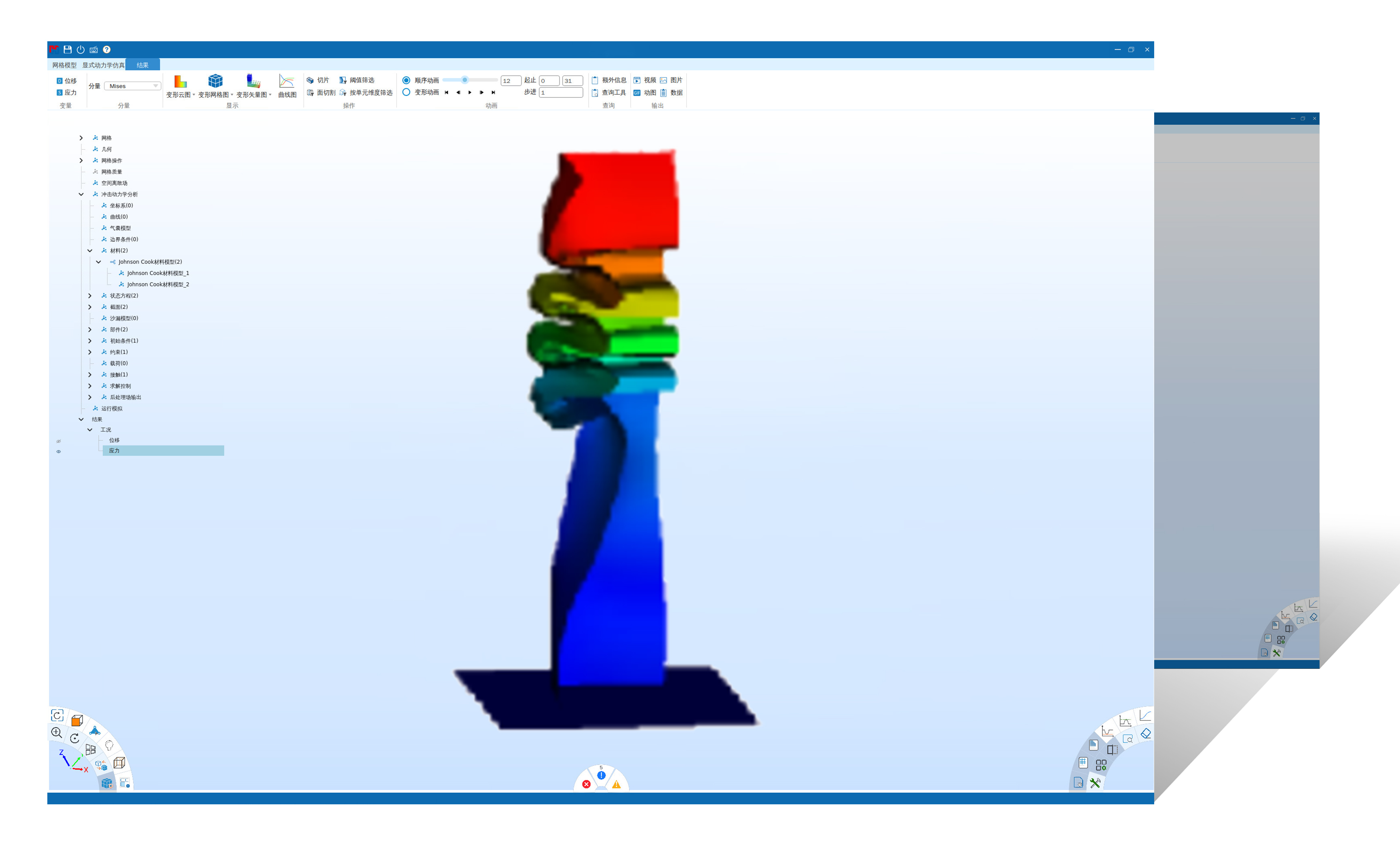
支持显式动力学积分算法、拉格朗日网格算法,支持丰富的材料本构模型,如Johnson-Cook模型、随动塑性硬化模型、Mooney-Rivlin橡胶模型、刚体材料、炸药模型、空物质、Johnson-Holmquist混凝土模型等;
具备冲击弹塑性分析、接触-碰撞分析、冲击极端大变形、冲击材料破坏分析等分析类型;
可解决汽车碰撞安全性分析、远程装备侵彻分析、包装跌落分析、金属冲压、飞机鸟撞分析等仿真问题。
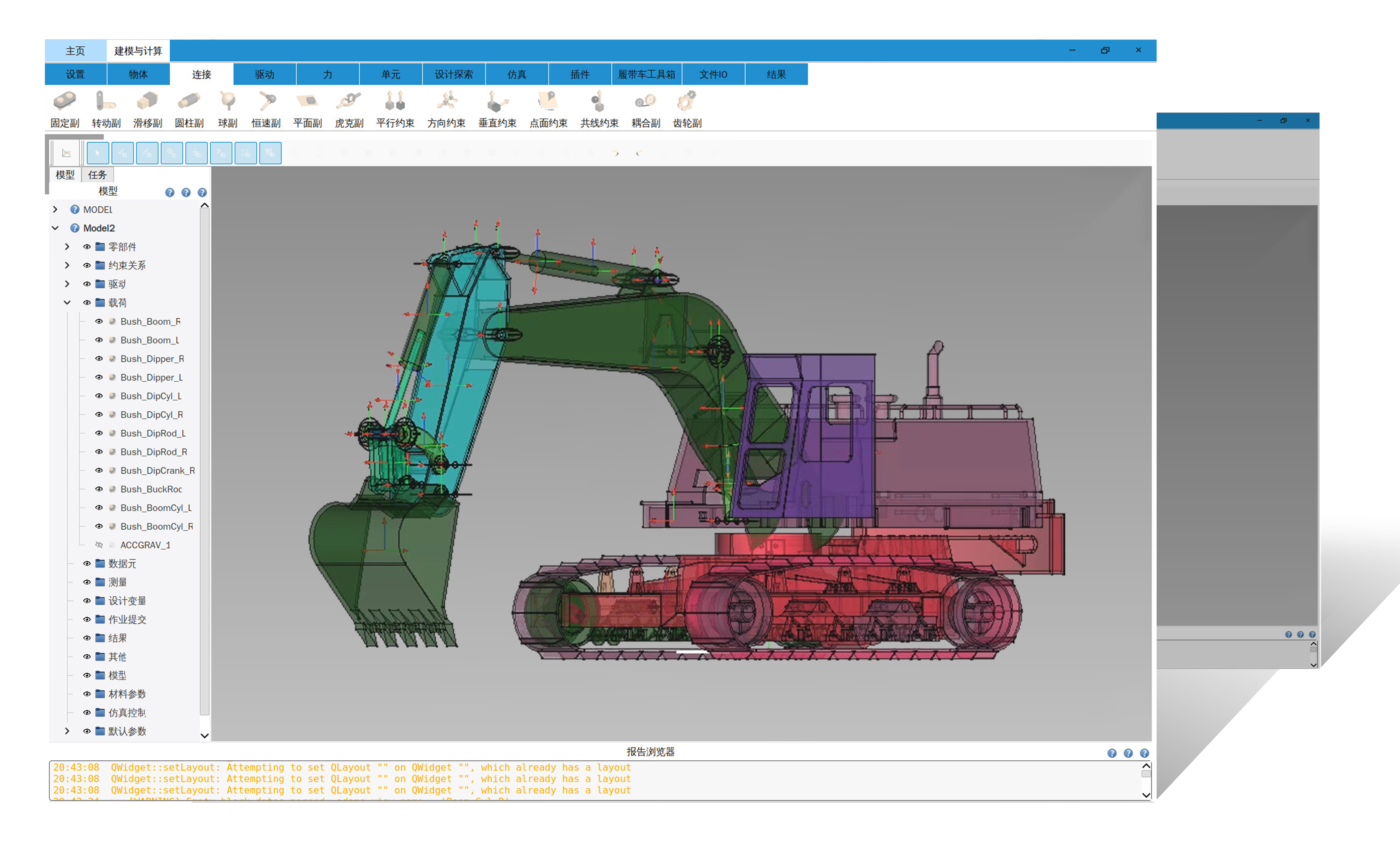
支持Index-3一阶BDF时间计算流程、冗余约束分析等求解方法;支持连杆、拉伸体、旋转体、柔性体、样条曲线、合并等几何建模功能;支持固定副、转动副、滑移副、虎克副、齿轮副等运动副类型;支持滑移驱动、旋转驱动等驱动类型;支持轴套力、旋转弹簧阻尼力、接触力、轮胎力等载荷类型;支持数据矩阵、数据样条曲线等数据单元类型;支持传感器、设计变量、方向测量等设计量类型;支持控制插件等控制联合仿真功能;支持链轮、履带板、缠绕等履带车专用零部件模板;支持动画绘制以及位移、速度、加速度、关节力、接触力等后处理曲线绘制;
具备运动学分析、多刚体系统动力学分析、含碰撞多体系统动力学分析、刚柔耦合多体系统动力学分析、多体动力学与控制联合仿真分析、振动分析等分析类型;
可解决履带车/轮式车通过性及平顺性分析、航天装备分离动力学分析、航天装备出筒动力学分析、航天器展开动力学分析、机械系统动力学分析等工程仿真问题。
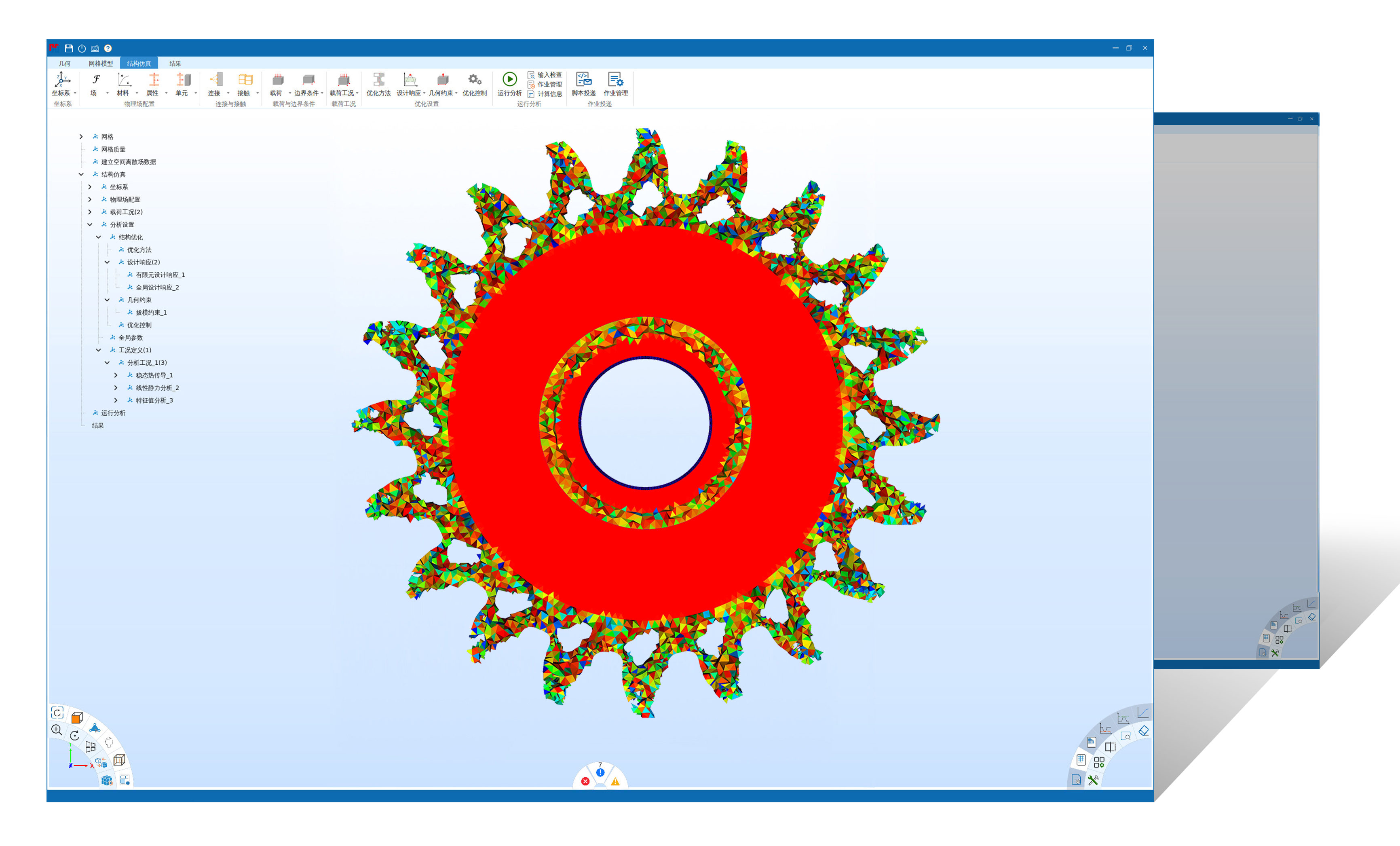
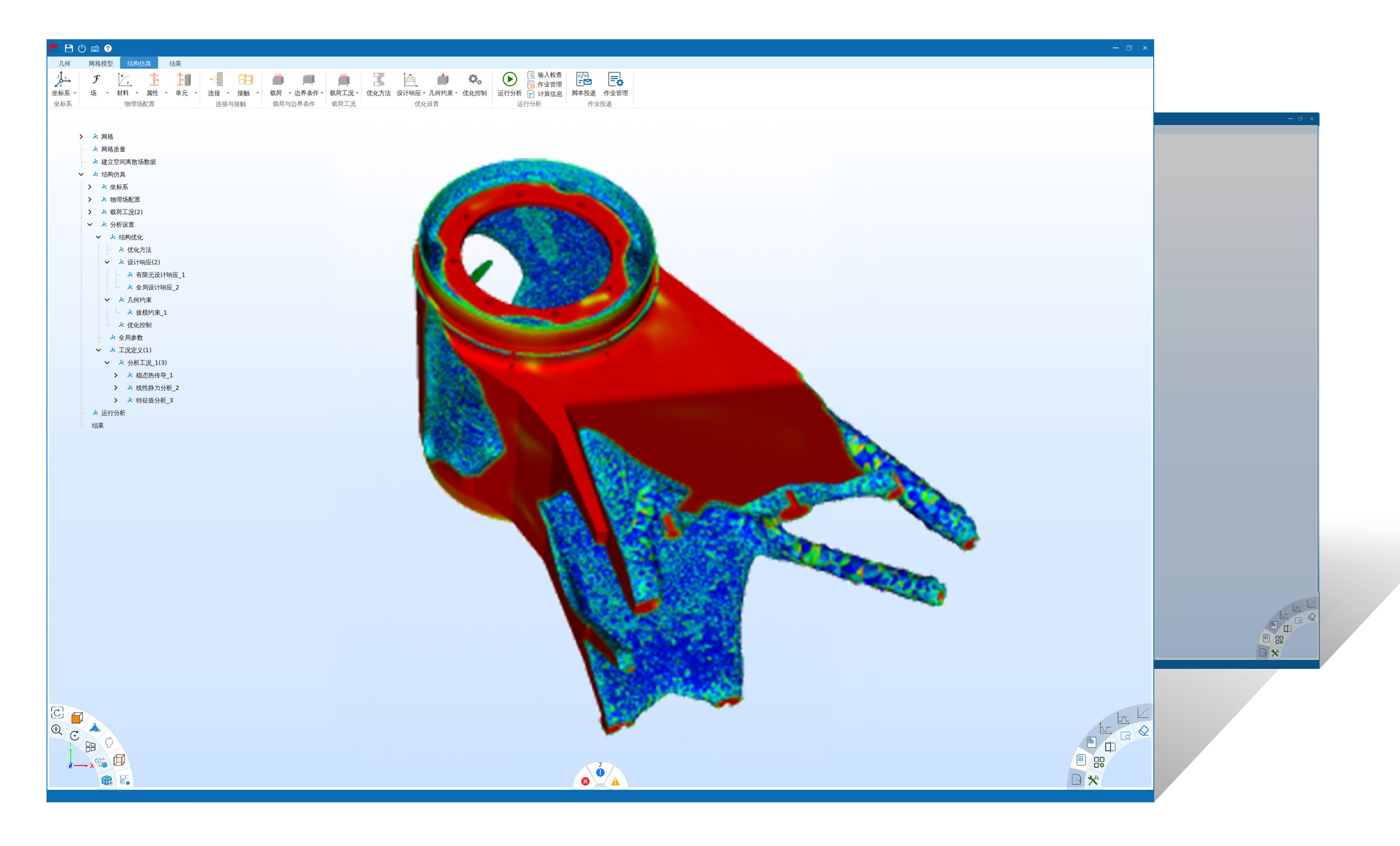
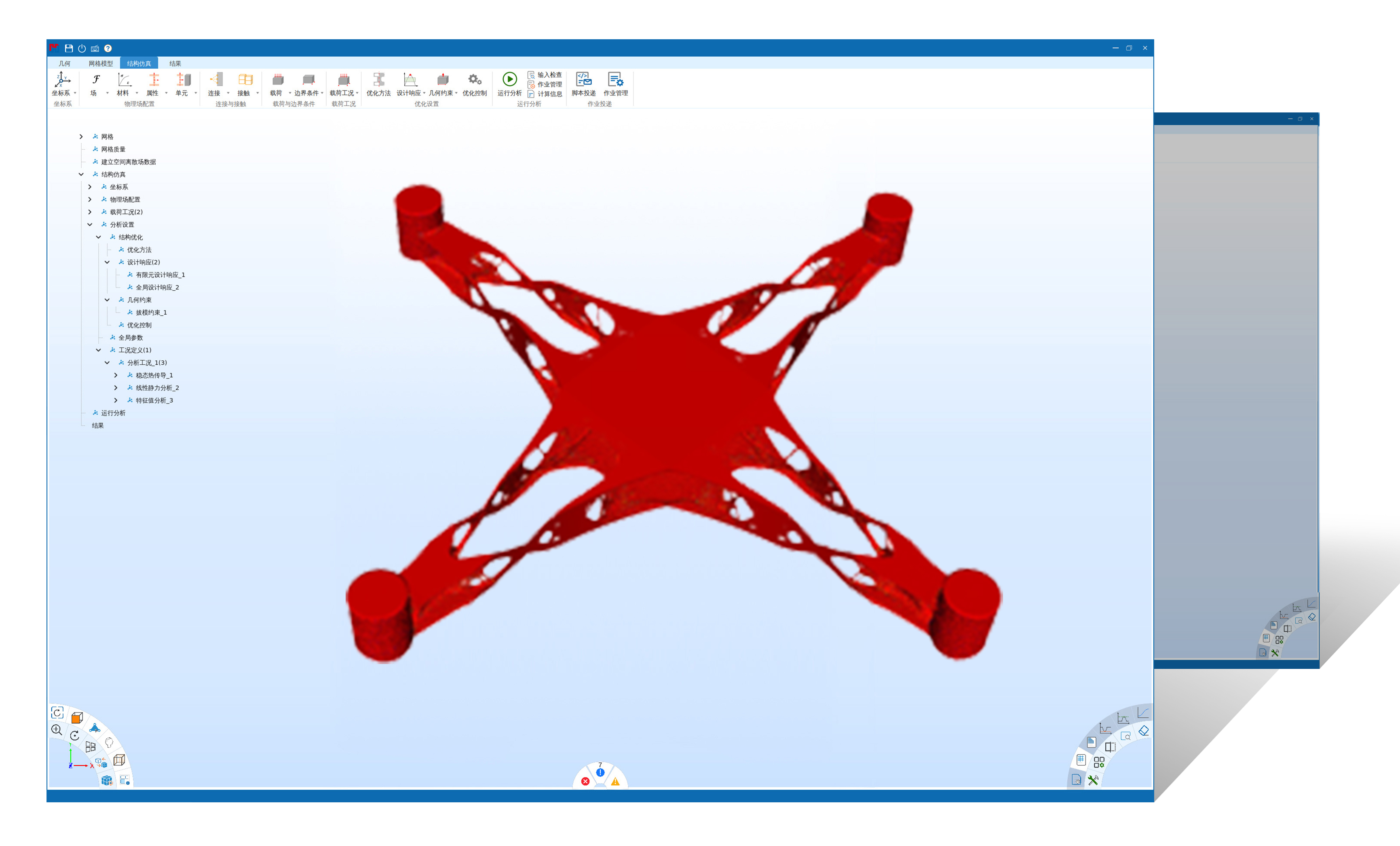
支持移动渐近线(MMA)优化算法;支持拓扑优化分析、尺寸优化分析、参数优化分析共3种工程仿真分析类型;支持设计域体积分数、设计域体积、质量分数、设计域质量、结构总质量、结构质心、拓扑优化灰度区域体积分数共7种几何相关设计响应类型;支持静柔度、最大静位移、最大静Mises应力、模态基频、屈曲临界特征值、热柔度、最高温度、最大频响位移幅值、压电系统性能指标共9种有限元相关设计响应类型;
具备稳态热传导、线性静力、线性模态、线性屈曲、模态频响、压电耦合6种有限元分析类型;
助力解决战略装备、航空、航天、航发、兵器、船舶、汽车等领域的轻量化设计工程仿真问题。
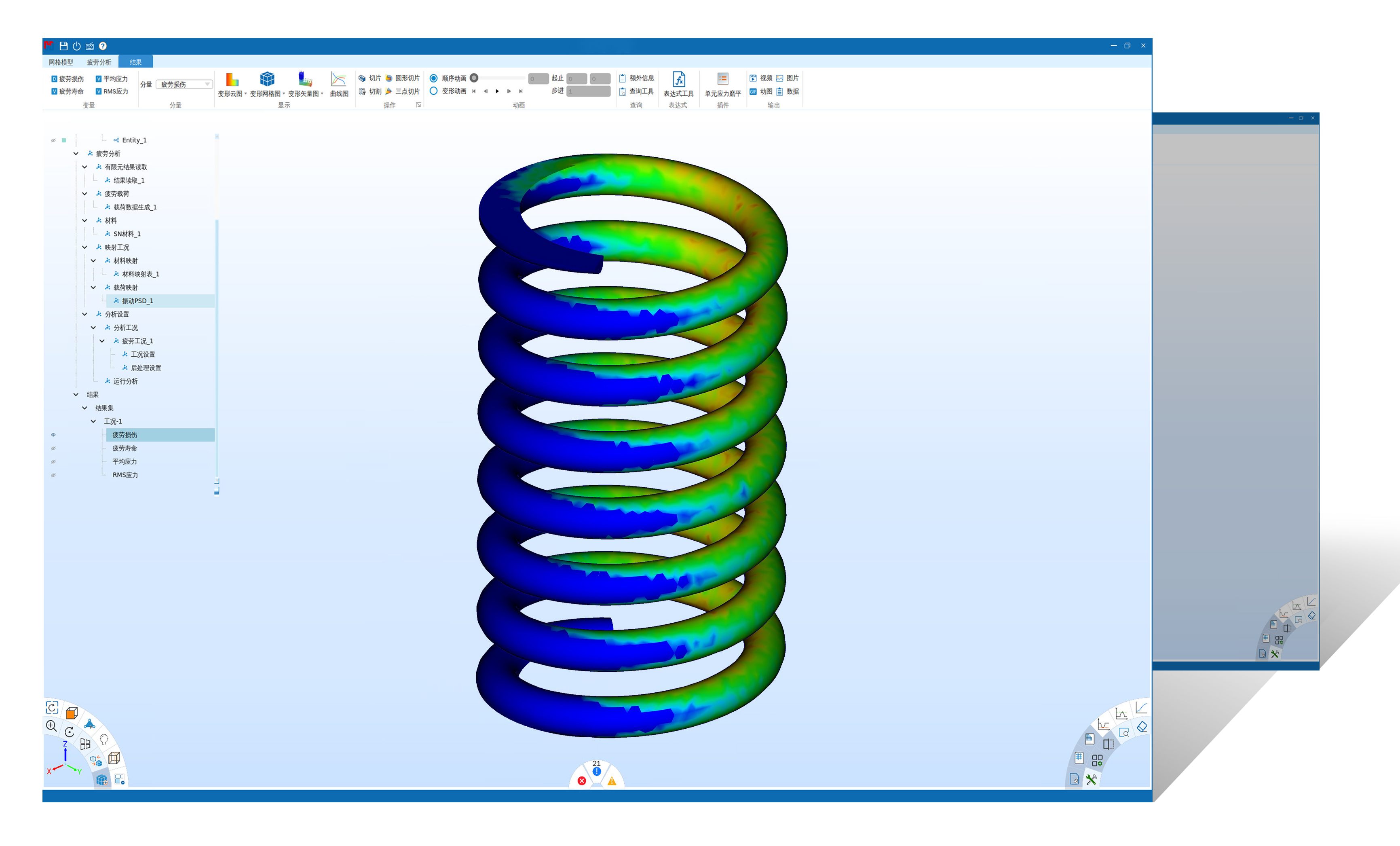
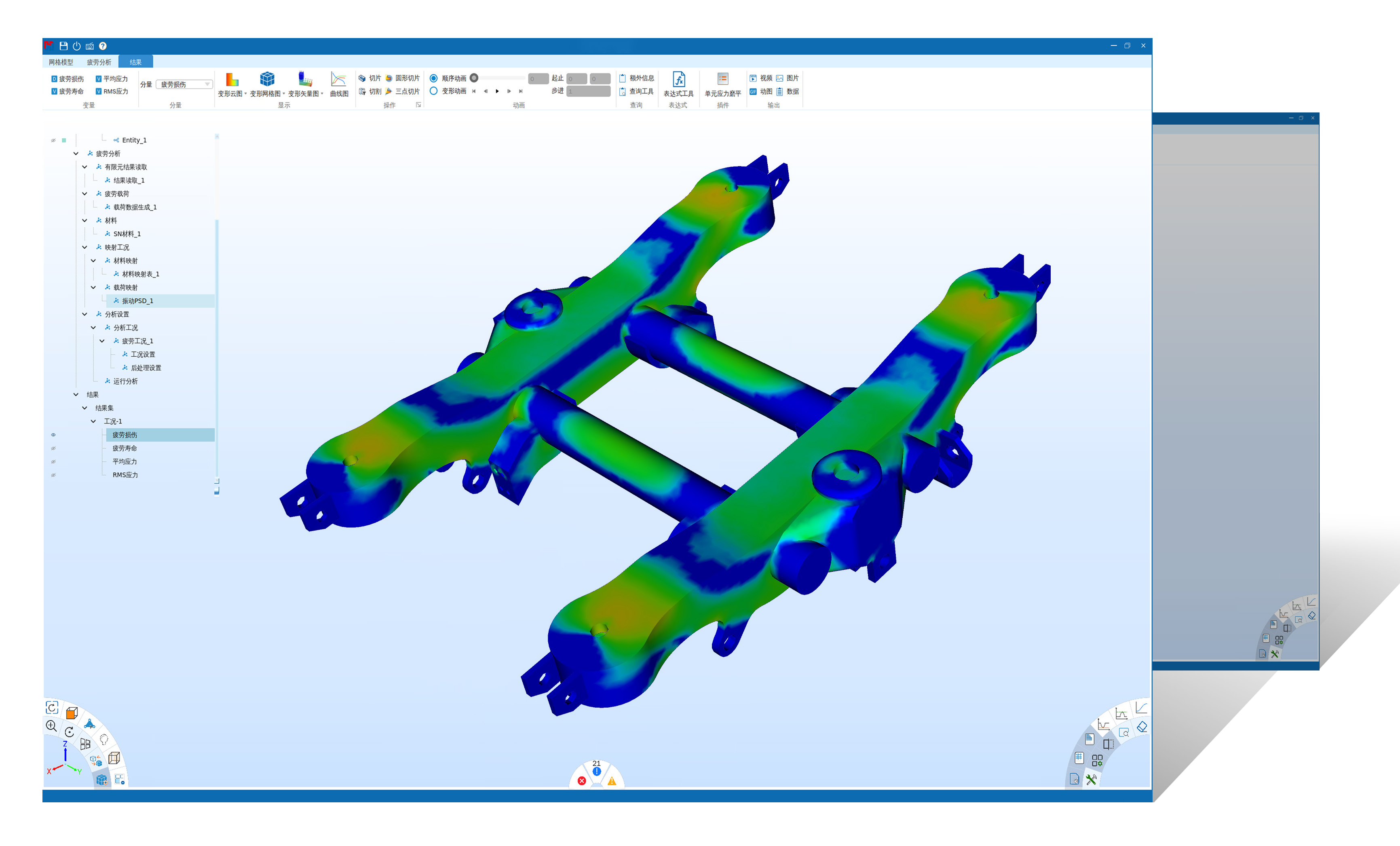
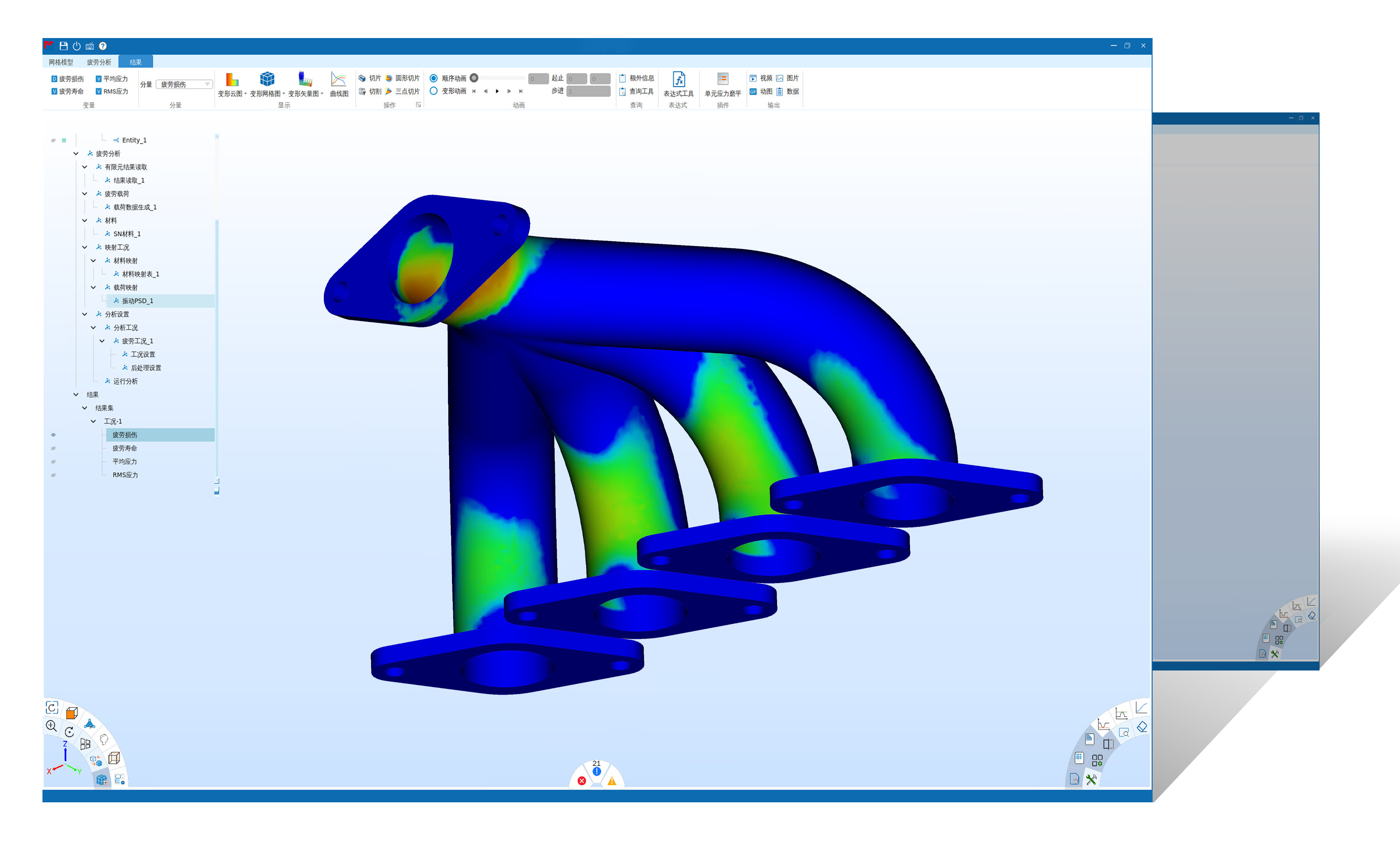
支持标准SN材料、标准EN材料及点焊材料模型;支持时间序列、时间步、随机PSD疲劳载荷;支持多种平均应力修正及多种计算分量处理方法;
具备应力疲劳、应变疲劳、随机振动疲劳、定频/扫频振动疲劳及点焊疲劳分析等功能;
可助力重大装备进行高周应力疲劳、低周应变疲劳、振动疲劳及点焊疲劳分析,快速评估装备的服役寿命,提高研发设计效率。
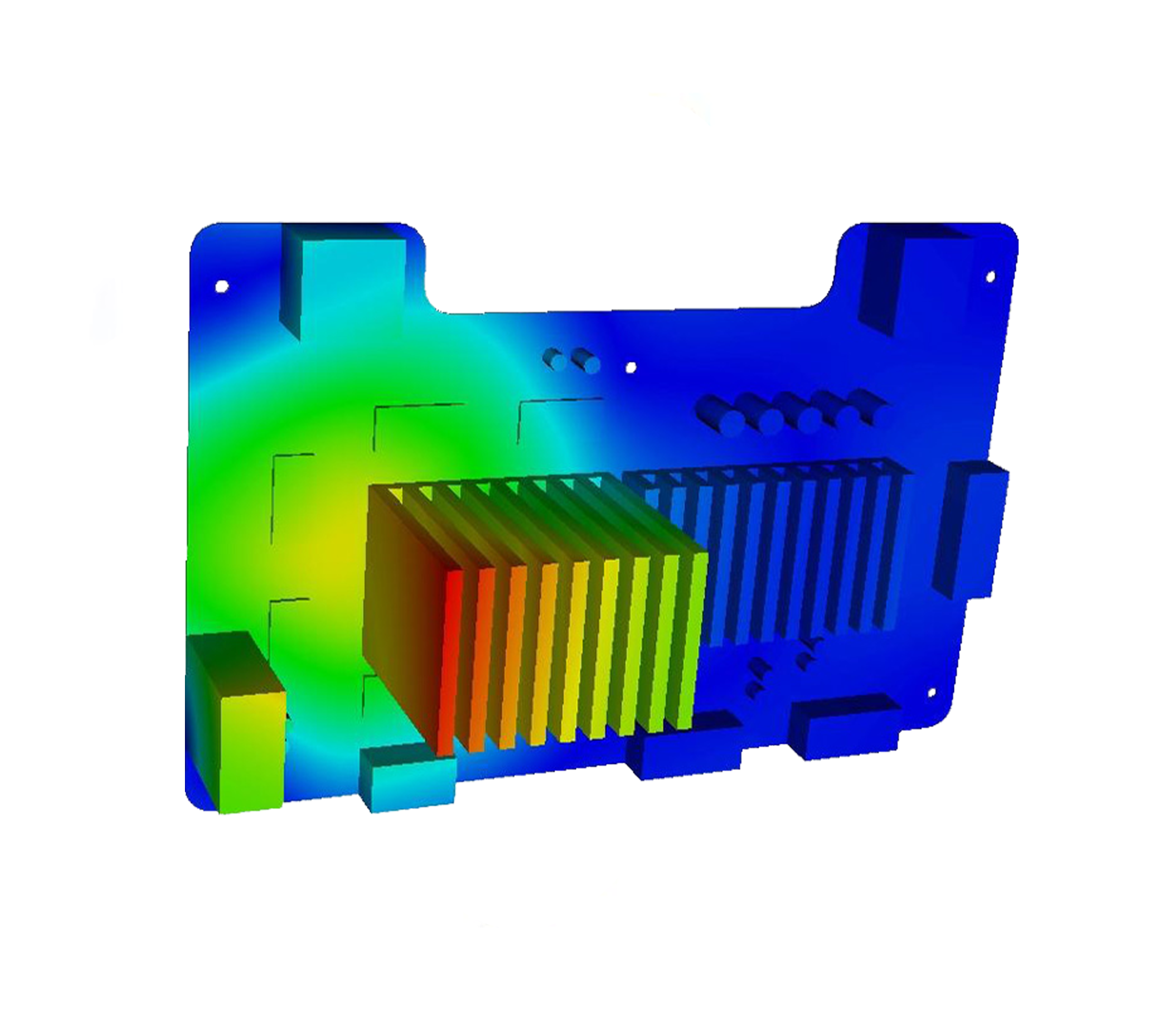
使用通用结构仿真模块,建立PCB主板与组件耦合约束,批量加载振动激励边界条件。
通过查看主板固有频率、振型、模态阻尼等核心数据,识别共振风险点与结构薄弱区域,进而支撑主板加强筋布局调整、器件安装位置优化等结构设计改进,提升抗振可靠性。

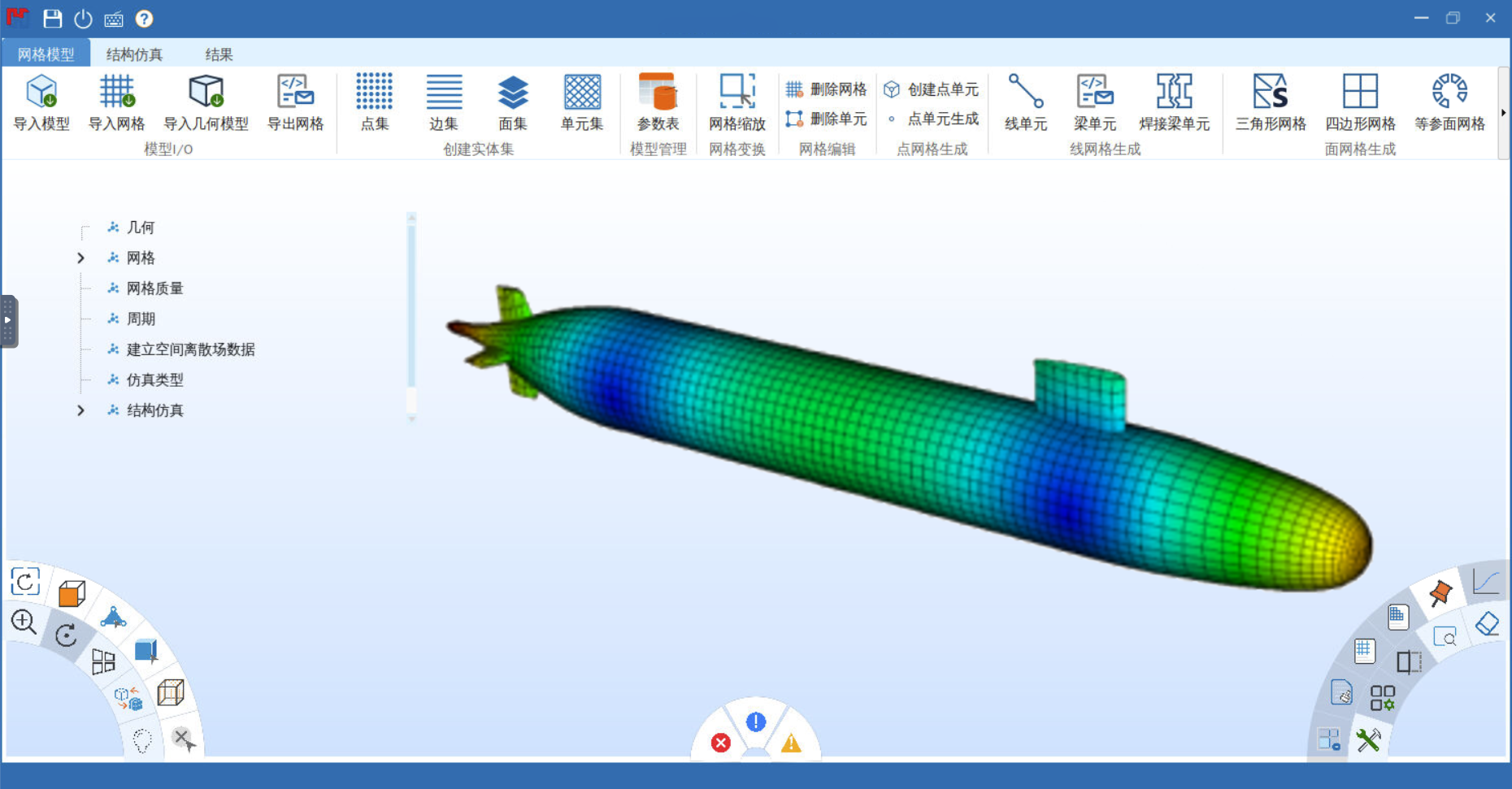
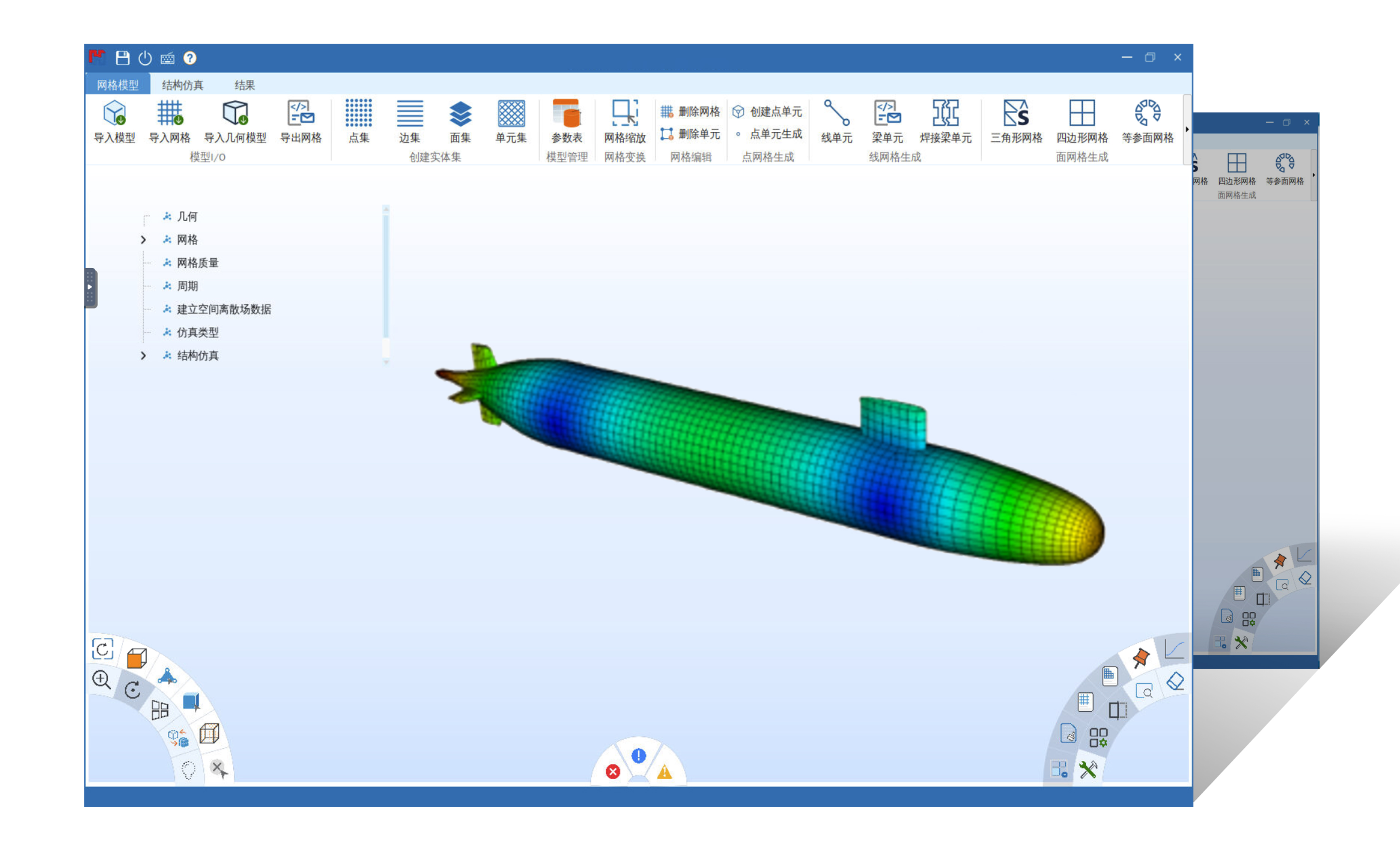
使用通用结构仿真模块,采用质量单元、弹簧单元、简易梁单元、壳单元建立有限元模型,含各向同性材料、各向异性材料、复合材料等材料,采用RBE2、RBE3刚性单元耦合节点自由度,施加正弦加速度激励及位移约束作为载荷工况,进行瞬态响应分析。
通过查看航天器典型结构的位移、速度、加速度、应力、应变,发现航天器在动态激励下的瞬态响应,支撑航天器的结构动强度设计。瞬态分析的结果亦可以作为关键输入,进行结构疲劳分析,进行装备的寿命预测。
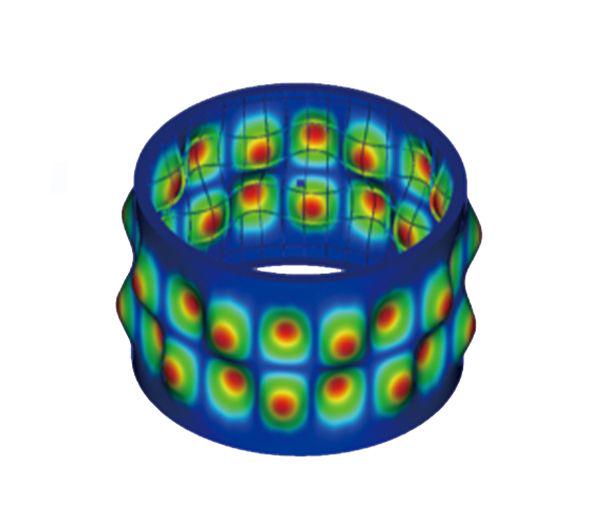
使用通用结构仿真模块,采用壳单元建立有限元模型,采用RBE2刚性单元耦合节点自由度,施加集中力与位移约束作为载荷工况,进行前屈曲分析。
通过查看航天装备加筋承力舱结构的屈曲变形形态、临界载荷因子,评估结构的极限承载能力,支撑结构的稳定性设计。
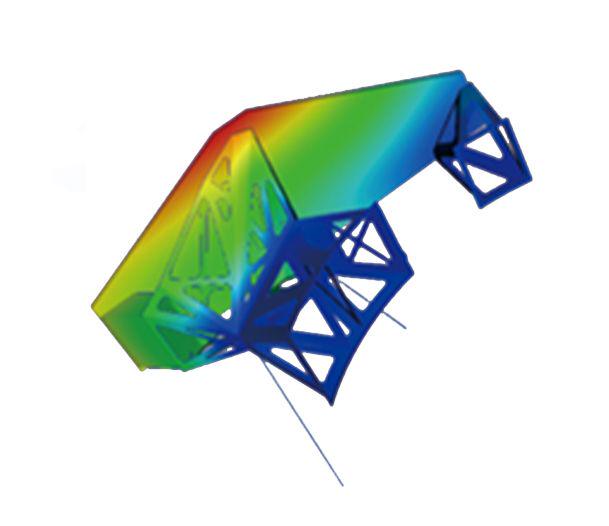
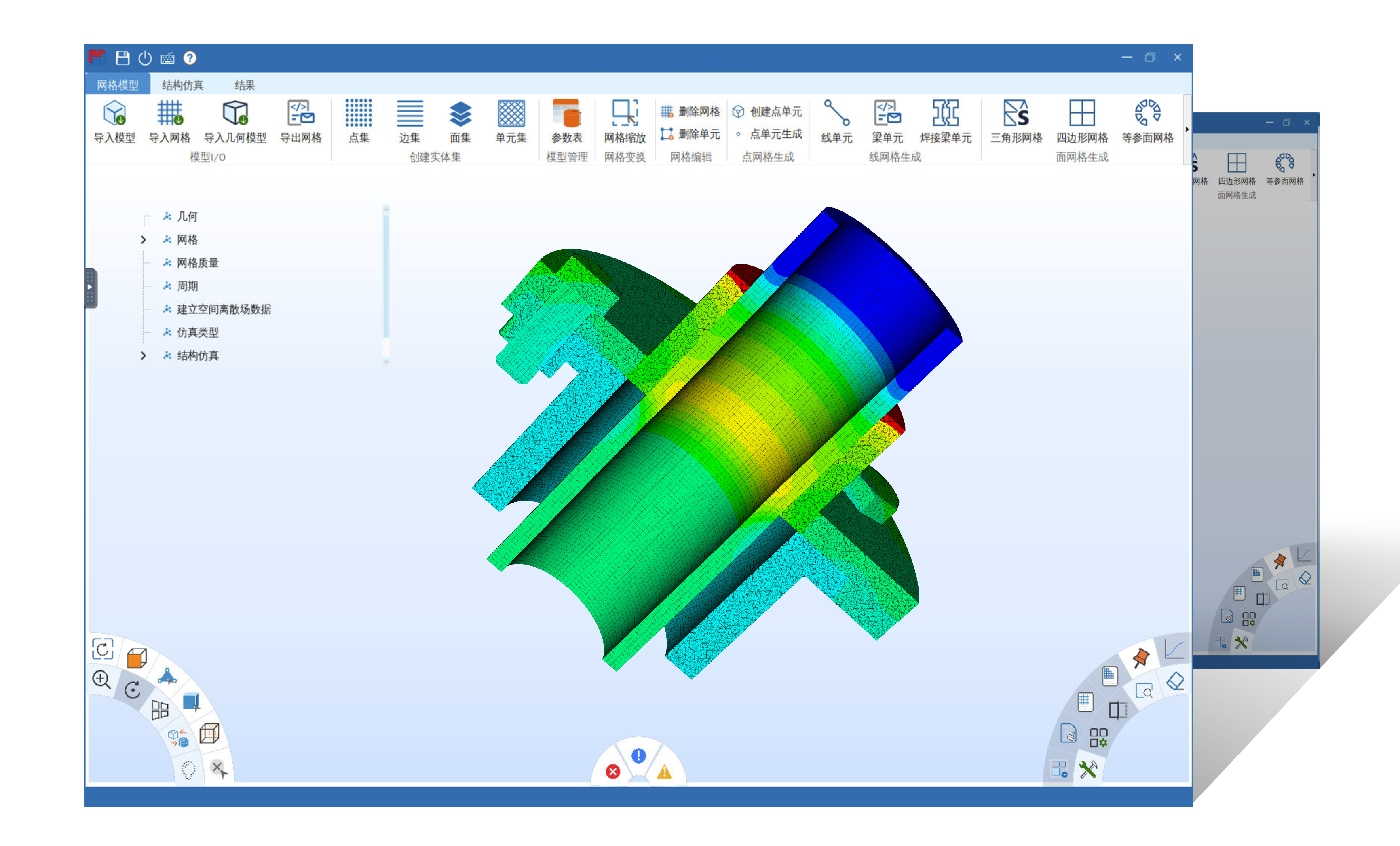
使用通用结构仿真模块,采用质量、梁、壳、实体单元组成有限元模型,含各向同性材料、各向异性材料、复合材料等材料,施加节点力及位移约束作为载荷工况,进行前屈曲分析。
通过查看卫星支撑结构在受力情况下的屈曲变形形态、临界载荷因子,评估结构的极限承载能力,支撑结构的稳定性设计。
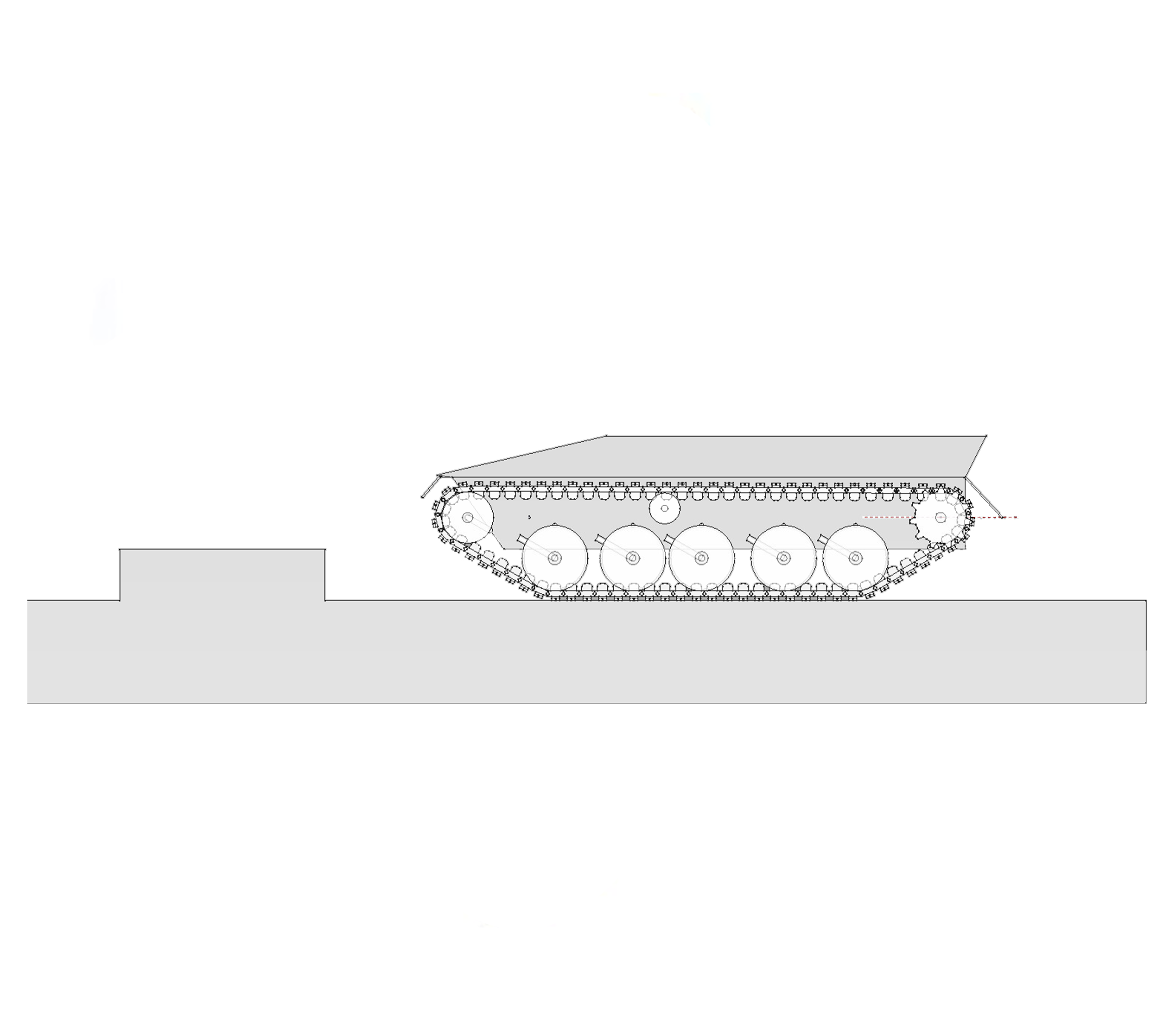
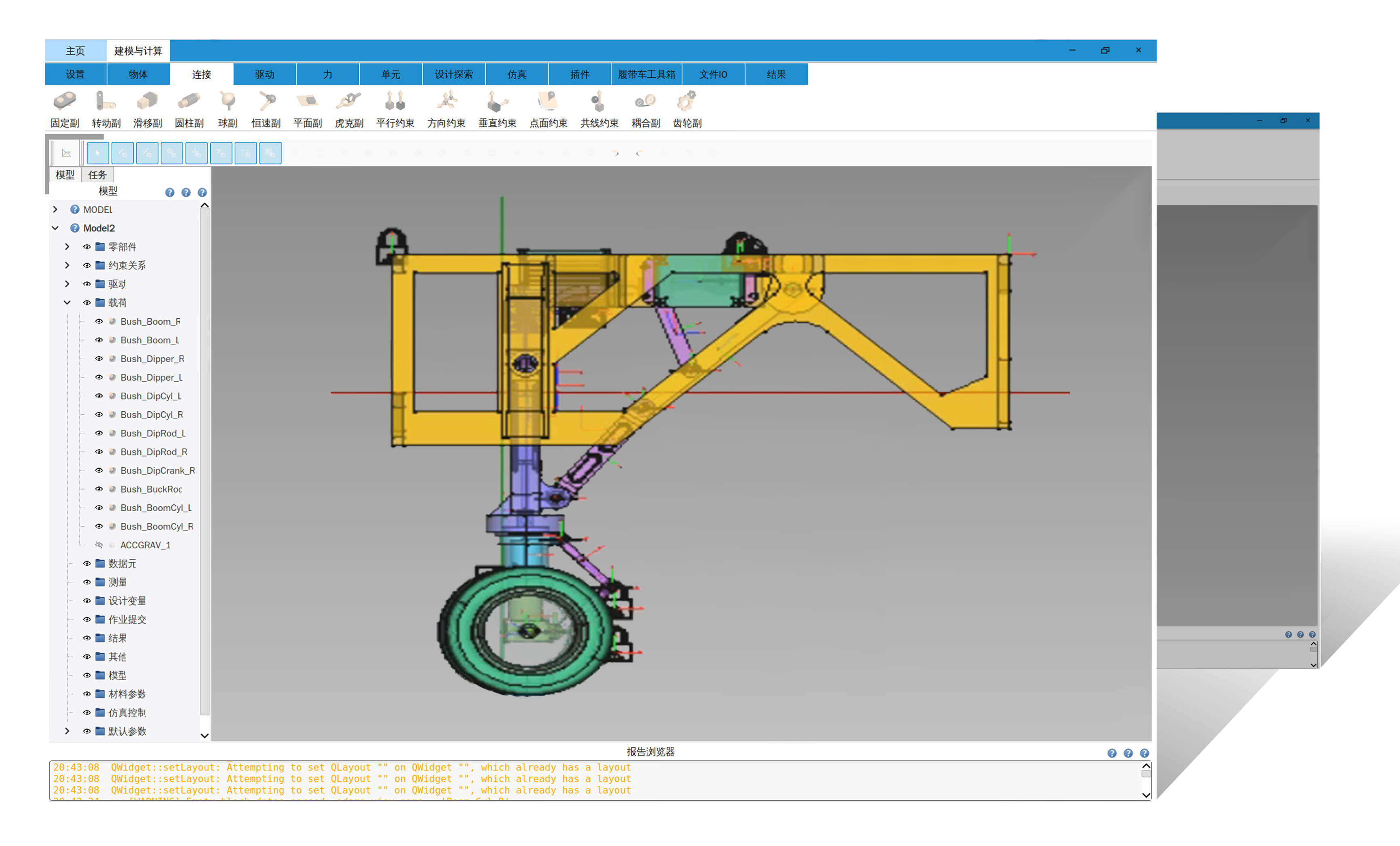
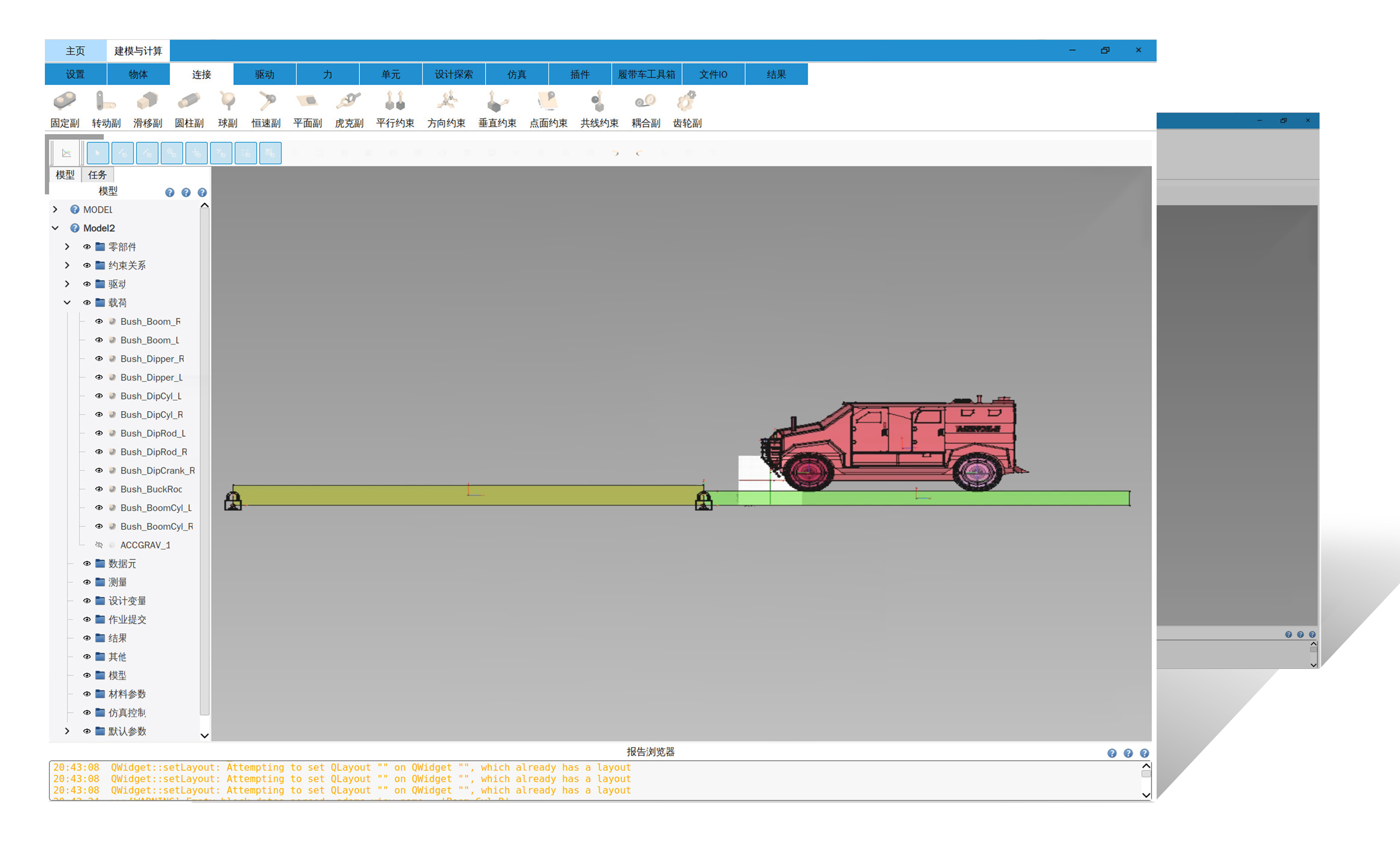
使用多体动力学仿真模块,采用刚体单元、橡胶衬套单元建立多刚体模型,采用球铰、转动铰、平移铰等约束副耦合各部件运动自由度,施加重力、驱动力矩作为载荷工况,考虑履带板和阶梯路面相互接触,进行通过性仿真分析。
通过查看履带车的整车姿态角、轮系垂直位移、履带接地压力、悬挂系统压缩量,发现履带车在阶梯地形动态激励下的通过性关键特征,支撑履带车的行走系统优化设计、地形适应性改进及结构可靠性提升。
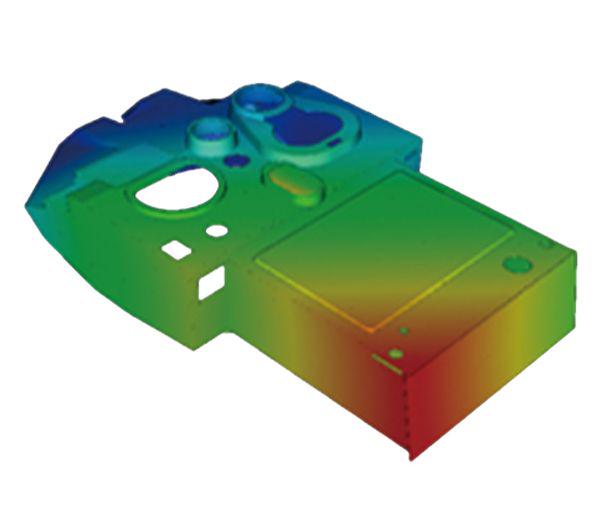
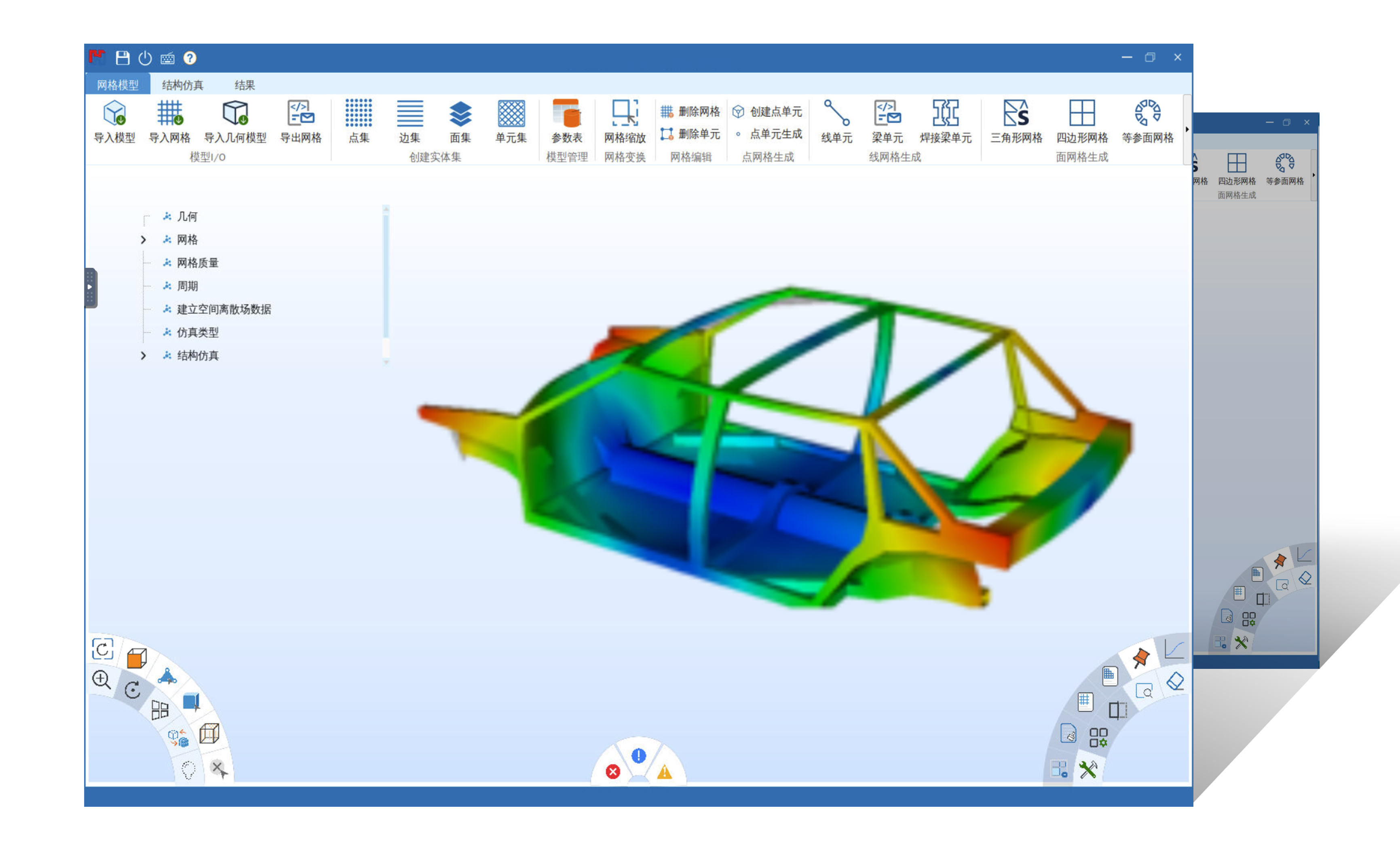
使用通用结构仿真模块,采用四面体实体单元建立有限元模型,施加位移约束作为载荷工况,进行模态分析。
通过查看车辆的模态频率及振型,发现可能导致共振的振动频率,支撑构件的强度设计。


中久数创官方公众号


